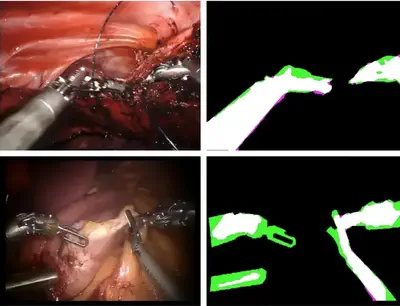
PhD opportunity on "Semi-supervised detection and tracking of instruments for robotic surgery guidance"
This project seeks to advance the state of the art in AI-based surgical tool detection and tracking by designing novel semi-supervised and weakly-supervised approaches able to achieve robust and real-time performance.
Aim of the PhD Project:
- Robust, real-time detection and tracking of surgical tools
- Learning from combined small-scale annotated and large-scale but non-annotated datasets of robotic surgery video footages
- Advancing the state of the art in combining self-supervision, week-supervision, and semi-supervision for surgical vision tasks
- Designing and validating stereo-vision based learning paradigms
1st Supervisor: Tom Vercauteren, King’s College London
2nd Supervisor: Miaojing Shi, King’s College London
Clinical Champion: Prokar Dasgupta, King’s College London
More information about the PhD project here.
Tom Vercauteren
Professor of Interventional Image Computing
Tom’s research interests include machine learning and computer assisted interventions