Posts
Muhammad led the development of FastGeodis, an open-source package that provides efficient implementations for computing Geodesic and Euclidean distance transforms (or a mixture of both), targetting efficient utilisation of CPU and GPU hardware. This package is able to handle 2D as well as 3D data, where it achieves up to a 20x speedup on a CPU and up to a 74x speedup on a GPU as compared to an existing open-source library that uses a non-parallelisable single-thread CPU implementation. Further in-depth comparison of performance improvements is discussed in the FastGeodis documentation.

Project overview:
- Title: Incorporating Expert-consistent Spatial Structure Relationships in Learning-based Brain Parcellation
- First supervisor: Tom Vercauteren
- Second supervisor: Rachel Sparks
- Clinical Supervisor: Jonathan Shapey
- Start date: February 2024
![PhD opportunity [February 2024 start] on "Incorporating Expert-consistent Spatial Structure Relationships in Learning-based Brain Parcellation"](/post/2022-11-15-twaiparcellation/featured_hu_2016b3f8a2bfe612.webp)
Project overview:
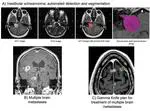
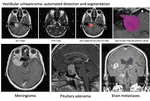
- Title: Artificial intelligence-driven radiosurgery planning for brain metastases
- First supervisor: Jonathan Shapey
- Second supervisor: Tom Vercauteren
- Clinical Supervisor: Ian Paddick
- Start date: October 2023
Project overview:
- Title: Accurate automated quantification of spine evolution — it’s about time!
- First supervisor: Marc Modat
- Second supervisor: Tom Vercauteren
- Clinical Supervisor: Amanda Isaac
- Start date: February 2024
![PhD opportunity [February 2024 start] on "Accurate automated quantification of spine evolution — it’s about time!"](/post/2022-11-13-spinequantification/featured_hu_10f61c2a584c33d8.webp)
Project overview:
- Title: Physically-informed learning-based beamforming for multi-transducer ultrasound imaging
- First supervisor: Laura Maria Peralta Pereira
- Second supervisor: Tom Vercauteren
- Clinical Supervisor: Dean Huang
- Start date: February 2024
![PhD opportunity [February 2024 start] on "Physically-informed learning-based beamforming for multi-transducer ultrasound imaging"](/post/2021-11-03-usbeamforming/featured_hu_2d5eed1369186ce.webp)

Lucas led on the development of the first fetal brain atlas for spina bifida aperta (SBA). This first-time atlas will allow researchers to perform measurements of the brain’s anatomy and to study its development in a large population of unborn babies with SBA

WiM-WILL is a digital platform that provides MICCAI members to share their career pathways to the outside world in parallel to MICCAI conference. Muhammad Asad (interviewer) and Navodini Wijethilake (interviewee) from our lab group participated in this competition this year and secured the second place. Their interview was focused on overcoming challenges in research as a student. The link to the complete interview is available below and on youtube.

Post overview:
- Title: Artificial intelligence-driven management of brain tumours
- Project ID: BE-MI2023_15
- First supervisor: Jonathan Shapey
- Second supervisor: Tom Vercauteren
- Start date: October 2023
- Application deadline: Wednesday 9 November 2022, 1:00 PM (GMT)
We are working to develop new technologies that combine a new type of camera system, referred to as hyperspectral, with Artificial Intelligence (AI) systems to reveal to neurosurgeons information that is otherwise not visible to the naked eye during surgery. Two studies are currently bringing this “hyperspectral” technology to operating theatres. The NeuroHSI study uses a hyperspectral camera attached to an external scope to show surgeons critical information on tissue blood flow and distinguishes vulnerable structures which need to be protected. The NeuroPPEye study is developing this technology adapted for surgical microscopes, to guide tumour surgery.